Mobiler mehrachsiger Prüfroboter
Es wurde ein Roboter entwickelt, dessen Prüfkopf in einem Ultraschall-Verfahren Risse in Turbinenläufern dokumentiert und die Rissausbreitungs- geschwindigkeit bei turnusmäßigen Untersuchungen bestimmt. Das Robotergestell ist einfach auf eine Gehäusehälfte des Turbinengehäuses aufbaubar, dadurch ist keine Demontage des Turbinenläufers erforderlich. Die Prüfarme tauchen über Präzisionsantriebe auf 1/10 mm genau in die Räume zwischen den Turbinenschaufeln. Die Anpositionierung erfolgt über die Verarbeitung der Konstruktionsdaten aus ProEngineer.
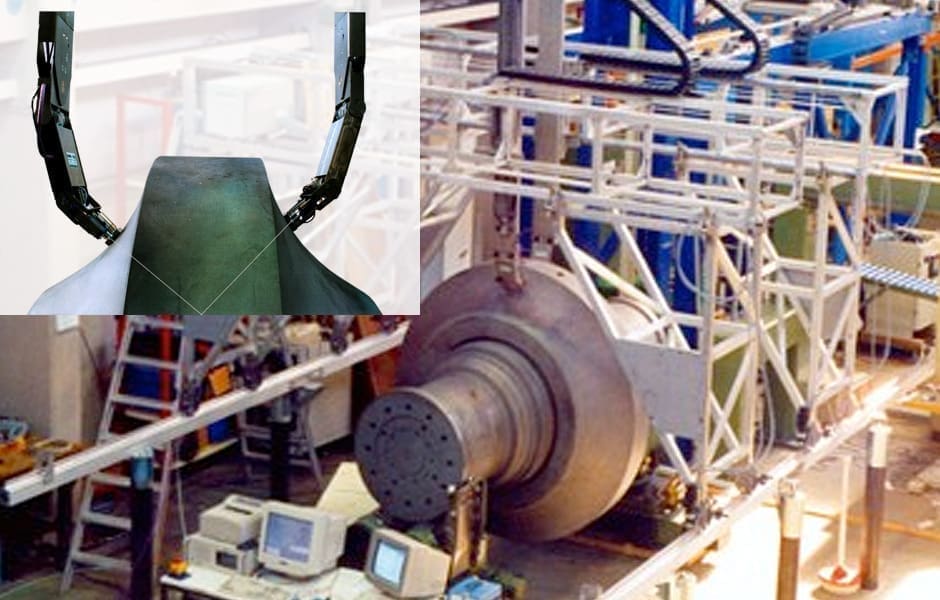

Reibradantrieb
Die Abbildung zeigt eine Sondermaschine zum rotatorischen Antrieb bzw. zur Positionierung großvolumiger Wellen mit bis zu 600 t Eigenmasse. Mittels einstellbarem Andruck des Antriebsrades lässt sich der Wellenkörper mit definierten Beschleunigungs- und Verzögerungsrampen bewegen und punktgenau positionieren. Dieser Antrieb wird in Kombination mit dem Ultraschallprüfroboter eingesetzt.

Prüfautomat Randschichthärte
In einem automatisierten Verfahren wird die Härte der Randschicht bei gehärteten Turbinenschaufeln geprüft. Mit diesem magnetischen Verfahren werden sehr gut reproduzierbare Messungen im Vergleich zur manuellen Untersuchung erzielt. Für den Automaten wurde im Hause der roTeg mbH eine eigene Software zur Protokollierung und Steuerung des Automaten entwickelt und erfolgreich umgesetzt.

Mobile 3-Achsen-CNC-Drehmaschine
Eingesetzt zur Bearbeitung korrodierter Ventilsitze in Turbinengehäusen, bewährt sich diese Drehmaschine turnusmäßig bei der Wartung von Kraftwerksanlagen. Mit diesem Gerät konnten erstmals Vor-Ort-Ventilsitze mit Durchmessern von 110 bis 800 mm bearbeitet werden. Dabei sind Bearbeitungslängen bis zu 1.500 mm möglich.